












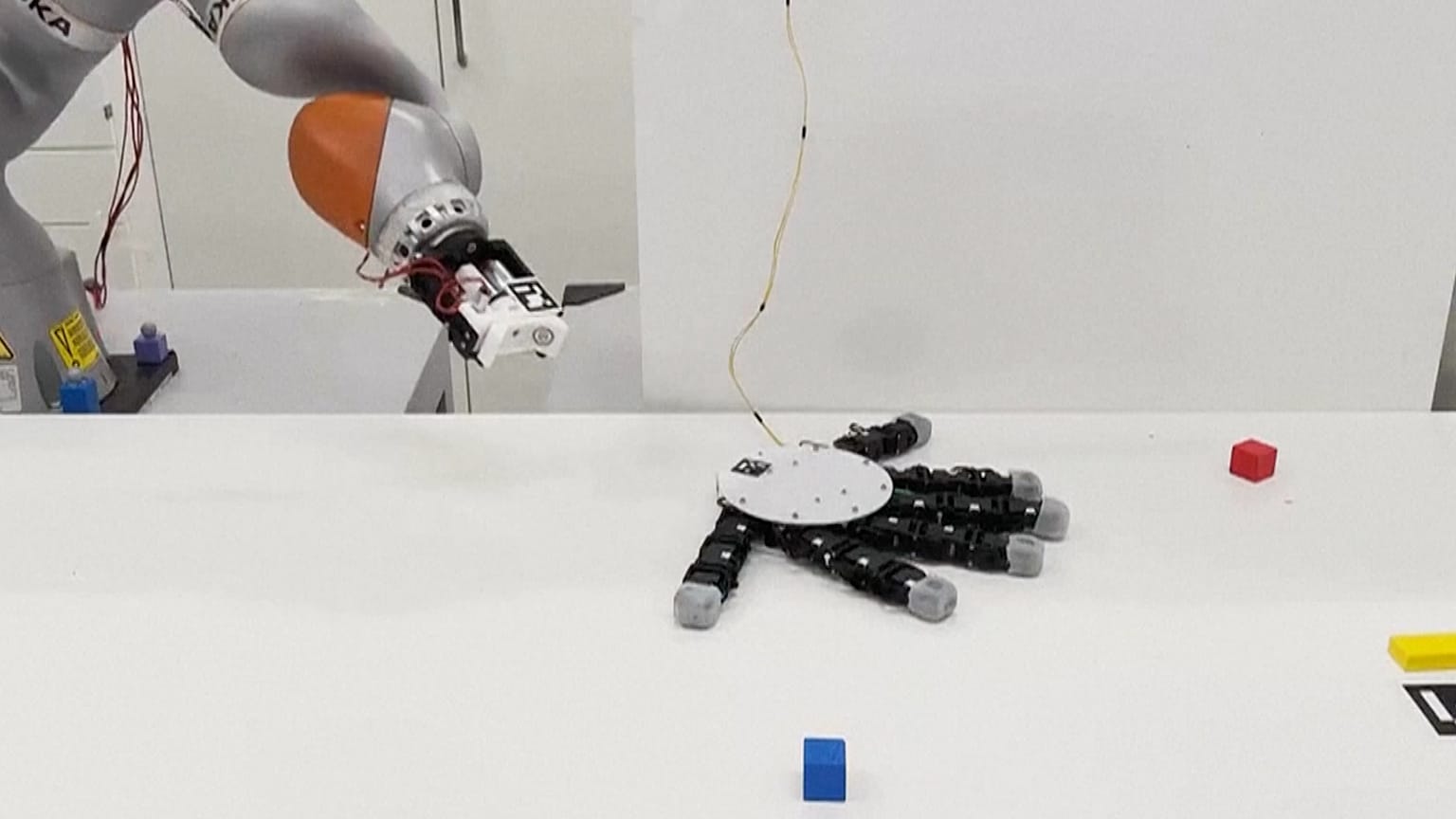
In tests, the hand was able to detach from its arm, crawl like a small multi-legged robot, and retrieve up to three objects in sequence before reattaching.
A hand crawling around, detached from an arm and seemingly with a life of its own.
It might sound familiar to fans of The Addams Family or Wednesday, but this "Thing" isn't fantasy, it's a tech reality.
The robotic hand design, described in Nature Communications this week, can crawl, grab objects beyond normal reach and then reattach itself to a robotic arm.
The research team says it can replicate more than 30 common human grasp types and lift objects weighing up to two kilograms.
Most robotic hands are designed to mimic the human hand.
But the research team says that approach comes with limitations.
"We think the human hand is not perfect…We have a lack of symmetry in the hand, and the hand can only perform a limited number of tasks due to the structure, the limitation of our hands,” said Kunpeng Yao, assistant professor at the University of Leeds in the UK.
“So what if we can release those constraints and make the robotic hand go beyond the functionality of the human hand, even more dexterous? I think that's the whole idea behind our design, and the problem we wanted to address," he added.
One key limitation, the team says, is that human hands rely on just one thumb and can only grasp from one side.
"Why having only one thumb? What if we had two or more, or any of the fingers could be a thumb?" asks co-author Professor Aude Billard from EPFL in Switzerland.
"If the fingers are all potentially thumbs or thumb and index, then you can have many pairs. So that allows you also to grab things with only those two fingers, for instance," Billard added.
The researchers developed two versions of the hand, one with five fingers and one with six.
Both have a symmetrical design that allows grasping from either side of the palm.
In tests, the hand was able to detach from its arm, crawl like a small multi-legged robot, and retrieve up to three objects in sequence before reattaching. It was able to do all that while maintaining a secure grip.
The team says future research may look at applications for the technology in tight spaces, including potentially rescue situations.
"There are always some confined space inside of the factory where you need, sometimes you need the hand that can detach and go inside of somewhere, maybe some industrial pipeline, big pipeline, so that the hand can go inside the pipeline or a small pipeline so that you can go around it,” said Xiao Gao, a co-author based at the School of Robotics at Wuhan University in China.
“So I think this is a very good scenario to use it."
For more on this story, watch the video in the media player above.


