












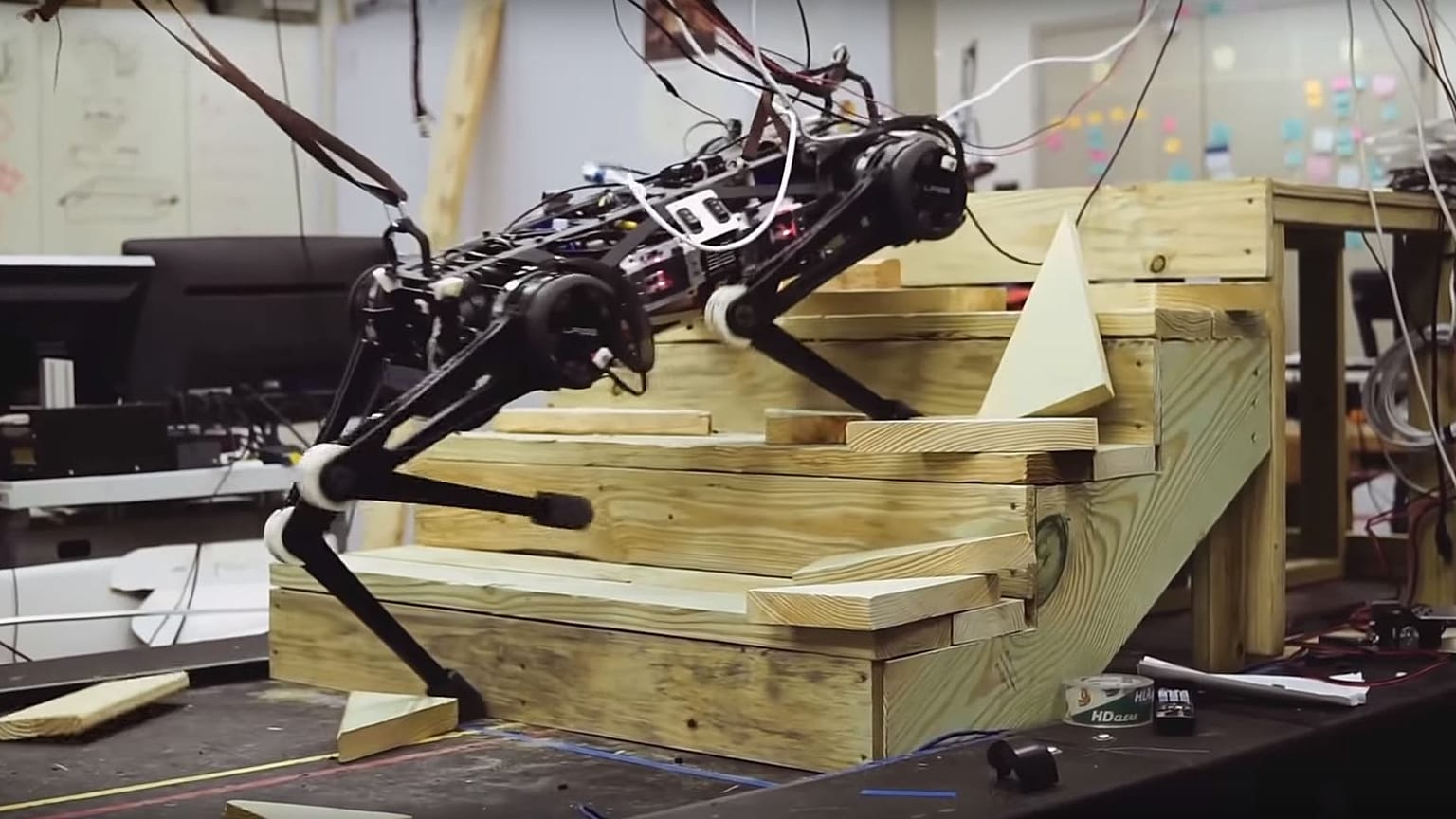
A 90-pound, four-legged robot built by engineers at Massachusetts Institute of Technology (MIT) can climb stairs littered with obstacles, leap, and restore its balance when yanked or shoved, all while essentially blind.
A 90-pound, four-legged robot built by engineers at Massachusetts Institute of Technology (MIT) can climb stairs littered with obstacles, leap, and restore its balance when yanked or shoved, all while essentially blind.
Instead, Cheetah 3 “feels” its way through its surroundings using “blind locomotion” to navigate areas where there is little to no visibility.
“There are many unexpected behaviors the robot should be able to handle without relying too much on vision,” says the robot’s designer and MIT’s associate professor in mechanical engineering, Sangbae Kim. “Vision can be noisy, slightly inaccurate, and sometimes not available … so we want the robot to rely more on tactile information. That way, it can handle unexpected obstacles while moving fast.”
Unlike its predecessor Cheetah 2, the Labrador-sized Cheetah 3 can also stretch backwards and forwards and twist from side to side.
It relies on algorithms to detect and respond to obstacles and contact, like a push or shove, as well as to determine how much force to use for each step.
Kim hopes such robots could be used to explore disaster zones and other inaccessible areas that are too dangerous for humans to venture.
“Cheetah 3 is designed to do versatile tasks such as a power plant inspection, which involves various terrain conditions including stairs, curbs, and obstacles on the ground,” he says.
"I think there are countless occasions where we [would] want to send robots to do simple tasks instead of humans. Dangerous, dirty, and difficult work can be done much more safely through remotely controlled robots.”
The machine’s vision-free capabilities will be tested in October at the International Conference on Intelligent Robots in Madrid. But more work needs to be done so it can handle increasingly perilous travel.
“We want a very good controller without vision first,” Kim says. “And when we do add vision, even if it might give you the wrong information, the leg should be able to handle (obstacles). Because what if it steps on something that a camera can’t see? What will it do? That’s where blind locomotion can help. We don’t want to trust our vision too much.”